Blender - Lerneinheit 6: Unterschied zwischen den Versionen
Admin (Diskussion | Beiträge) (→Lernziele:) |
Admin (Diskussion | Beiträge) |
||
| (6 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
[[Category:Blender]] | [[Category:Blender]] | ||
| + | =Diese Seite ist veraltet.= | ||
==Seminar== | ==Seminar== | ||
| − | ===Lernziele | + | ===Lernziele=== |
Sie lernen weitere Möglichkeiten zur Animation kennen.<br> | Sie lernen weitere Möglichkeiten zur Animation kennen.<br> | ||
Sie wissen, was ''[https://dict.leo.org/german-english/constraint Constraints]'' sind und wie dieser eingesetzt werden können.<br> | Sie wissen, was ''[https://dict.leo.org/german-english/constraint Constraints]'' sind und wie dieser eingesetzt werden können.<br> | ||
| − | Sie wissen, wozu ''Driver'' verwendet werden können.<br> | + | Sie wissen, wozu ''[[Driver]]'' verwendet werden können.<br> |
Sie kennen die Möglichkeiten, mir einer ''Armature'' (Skelett) aus ''Bones'' z. B. Charaktere zu animieren.<br> | Sie kennen die Möglichkeiten, mir einer ''Armature'' (Skelett) aus ''Bones'' z. B. Charaktere zu animieren.<br> | ||
Sie kenne den Begriff ''Inverse Kinematik'' und können Vor- und Nachteile zur ''Forward Kinematik'' aus Lerneinheit 5 ableiten.<br> | Sie kenne den Begriff ''Inverse Kinematik'' und können Vor- und Nachteile zur ''Forward Kinematik'' aus Lerneinheit 5 ableiten.<br> | ||
| Zeile 22: | Zeile 23: | ||
File:Constraints1c.png|Frame 10 | File:Constraints1c.png|Frame 10 | ||
</gallery> | </gallery> | ||
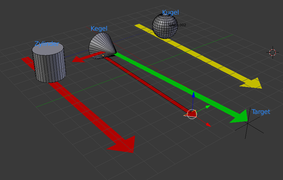
| + | Der gelbe Pfeil stellt die Bewegung durch die Keyframeanimation dar. Rot sind die Bewegungen, welche aus den ''Copy Location''-Constraints resultieren. Grün stellt die Rotation durch ''Track To'' dar. | ||
====Grundlagen ''Driver''==== | ====Grundlagen ''Driver''==== | ||
| Zeile 28: | Zeile 30: | ||
==Praktikum== | ==Praktikum== | ||
| − | === | + | ===Lernziel=== |
| − | Sie haben den Roboter aus Lerneinheit 5 mit einer Armature versehen und mittels IK animiert. Die Ausrichtung des Greifers steuern Sie über Constraints. | + | Sie haben den Roboter aus Lerneinheit 5 mit einer Armature versehen und mittels IK animiert. Die Ausrichtung des Greifers steuern Sie über Constraints oder Driver. |
==Literatur, Links== | ==Literatur, Links== | ||
Aktuelle Version vom 16. April 2020, 21:34 Uhr
Inhaltsverzeichnis
Diese Seite ist veraltet.
Seminar
Lernziele
Sie lernen weitere Möglichkeiten zur Animation kennen.
Sie wissen, was Constraints sind und wie dieser eingesetzt werden können.
Sie wissen, wozu Driver verwendet werden können.
Sie kennen die Möglichkeiten, mir einer Armature (Skelett) aus Bones z. B. Charaktere zu animieren.
Sie kenne den Begriff Inverse Kinematik und können Vor- und Nachteile zur Forward Kinematik aus Lerneinheit 5 ableiten.
Selbststudium
Lernziele
Sie wissen, wie Constraints und Driver angewendet werden.
Sie haben Objekte mit Hilfe von Constraints animiert.
Sie haben Parameter mit Hilfe eines Drivers aneinander gekoppelt.
Aufgabe
Grundlagen Constraints
Animieren Sie drei Objekte. Ein Objekt (Kugel) wird mit Keyframes animiert. Das Objekt Zylinder beziehen seine Animationsdaten durch Verwendung von z. B. Copy Location von diesem Objekt. Das Objekt Kegel besitzt zwei Copy Location Constraints, jeweils auf Kugel und Zylinder zielend, deren Influence-Wert animiert ist. Auf diese Weise kann der Kegel von der Kugel-Position zur Zylinder-Position wechseln. Dabei bleibt der Kegel mit der Spitze auf das Target-Objekt ausgerichtet. Hierzu verwenden Sie z. B.Track To.

Frame 1
Frame 5

Frame 10



Der gelbe Pfeil stellt die Bewegung durch die Keyframeanimation dar. Rot sind die Bewegungen, welche aus den Copy Location-Constraints resultieren. Grün stellt die Rotation durch Track To dar.
Grundlagen Driver
Ersetzen Sie die Constraint Copy Location des Zylinders durch einen Driver. Dieser liest die x-Position der Kugel aus und überträgt sie auf die x-Position des Zylinders. Steuern Sie für den Kegel den Influence-Wert für Copy Location mit dem Ziel Zylinder in Abhängigkeit von der x-Position der Kugel. Sie müssen dabei eine kleine Expression in das Feld Expr: schreiben, um den Wert zu normalisieren. Diese enthält lediglich die Grundrechenoperationen (+ bzw. - und /). Zum Start der Bewegung muss ein Wert von 0 an den Parameter Influence weitergegeben werden, am Ende sollte ein Wert von 1 weitergegeben werden. Werte <0 und >1 werden abgeschnitten. Alles was <0 ist , ergibt 0 und alles was >1 ist, ergibt 1.
Praktikum
Lernziel
Sie haben den Roboter aus Lerneinheit 5 mit einer Armature versehen und mittels IK animiert. Die Ausrichtung des Greifers steuern Sie über Constraints oder Driver.
Literatur, Links
Grundlagen
Tutorial - Neal Hirsig, Path Animation
Tutorial - Neal Hirsig, Camera Path Fly Around
weiterführende Links
Tutorial - CG Cookie, Introduction to Scripting with Python in Blender 59:13